刘风旺, 韩 娜, 许宗岭, 邹月英, 刘 志
(中通客车股份有限公司, 山东 聊城 252022)
随着公共交通和旅游业的快速发展,客车行业进入到高速发展转型的关键阶段,新车型更加注重智能化、信息化、安全化等问题。本文结合相关技术,研发一种基于NI myRIO的智能驾驶客车路况识别系统[1-3]。该系统以NI myRIO控制器设计为主、硬件电路和监控电路的设计为辅。
本系统设计的核心内容是数据传输,包括自平衡行驶、读取传感器数据、电机转速控制、自动控制及人工智能。该系统通过摄像头和传感器检测[4-5],将数据传输到NI myRIO处理器,驱动系统控制其电机转速大小;Wi-Fi模块和手机APP通信可将前方检测的路况实时反映到我司PC端显示界面上。将NI myRIO作为主控来实现智能客车360度的检测、识别、行驶,共分为终端控制端、检测端、前进行驶端3个节点。当驾驶员疲劳时,可开启自动驾驶功能,使车辆保持匀速行驶;通过控制器反馈的信号,可在我司PC端实时观察车辆的各项信息指标,以便工作人员读取数据,判断车辆各部件是否正常运行,预防出现突发情况,保障了车辆及车上乘客的人身安全。车身拥有强大的防御装置,可提前检测并避开山体滑落及石块阻碍;可根据路况控制智能客车行驶的速度,选择最优的行驶路线,以此解决路况故障及人机交互工作中产生的问题。
采用NI myRIO核心芯片控制电路,NI myRIO控制器中内嵌的XiLinx Zynq芯片具有低功耗、低成本、高性能、便携的优势,同时控制器具有不同程度的智能性(记忆、感知、推理、学习)。工控方面,用户要求更快的中断速度。采用TZ460XSF06永磁同步电动机,额定功率为143 kW;额定转矩为1 606 N·m;冷却方式为水冷;最高转速为3 000 r/min;通过CAN总线给出电机控制和动力电池管理指令[6],实现整车驱动及能量优化,同时可通过综合仪表接口功能(仪表上显示整车状态信息),完善该客车的故障诊断、处理及整车网络管理功能。可通过编码器控制其转速,无需使用相位顺序表、高频率控制等复杂的界面编程。工作电压为5~15 V,通讯方式为串口通信。我司网络PC端可显示清晰的界面和准确的行驶路况。其结构流程如图1所示。

图1 结构流程
3.1 系统控制原理
控制电路使用了一种采样数据技术以降低主控电路的平均功耗,采用STM32F407控制板和智能驾驶通讯处理[7]。主控芯片NI myRIO与控制芯片STM32F407进行数据的传输,通讯处理通过单片机外部连接传感器采集数据反馈到控制芯片进行内部集成,再传输到主控芯片进行远程传输,数据间通过主控芯片传输到我司的PC端,便于工作人员实时监测车辆的信息状况。定时器不仅能输出多路PWM供给电机使用,还能快速处理摄像头和PWM信号传回的数据,从而提高智能客车的运行速度和处理信号的采集频率,使其模块核心芯片能较好地满足功能要求。
3.2 系统控制参数
该系统的控制对象为车辆行驶参数,控制的目的是使系统自动识别并进行调节,以提供最优运载能力和路况环境。摄像头与手机APP共同负责网络通信。系统控制参数见表1。

表1 系统控制参数
4.1 主系统软件设计
该项目通过LabVIEW 2016设计[8],由程序框图设计主程序。通过内部的NI myRIO插件编写来实现相对应的功能。主程序流程如图2所示。

图2 主程序流程
4.2 主程序流程详解
1) 对系统进行初始化。在监控程序中,首先对系统进行初始化编程。硬件方面包括NI myRIO控制器和辅助控制器STM32F407系统的初始化;软件方面主要是针对于标志位的赋值,定义按钮、继电器与精进电机装载运行,读取E2PROM的数据,同时采用蜂鸣器对行驶中遇到的路况障碍进行报警提示。
2) 显示界面。通过应用LabVIEW软件在程序框图的界面编写液晶显示屏和物流机器人交互相接的数据,直接调用该程序框图,主程序每循环一遍清屏一次,通过函数的嵌套调用再次调用时钟芯片DS1302读取时间,将读取回来的值显示在液晶显示屏界面上,经由串口通信传输到主控系统,主控系统中的无线模块GPS定位传输到远程界面,主控芯片针对不同的数据及时作出相应的处理[9]。采集显示程序流程如图3所示。

图3 采集指令系统流程
3) PID控制算法应用。PID控制器参数的自动调整是运用智能化一体化调整或自校正、自适应、自整合算法来完成,其控制原理如图4所示。
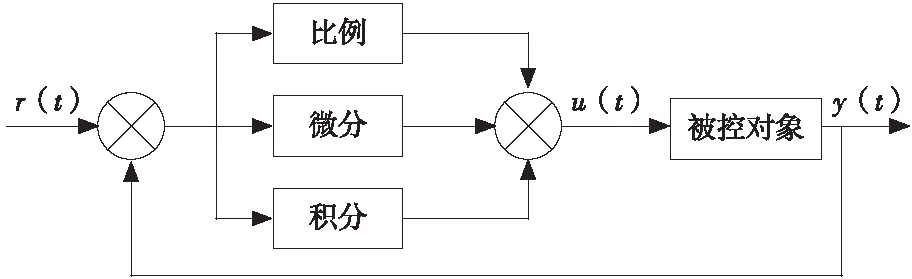
图4 PID控制原理
PID调节器是一种线性调节器,可通过MATLAB软件的计算数据和响应曲线将相应的数据传回主控面板,PID调节器中给定值r(t)与控制输出值u(t)的偏差即比例、积分、微分,三者通过线性组合构成控制量,以此来达到对被控对象实际输出值y(t)的转速控制[10]。
5.1 系统硬件调试
交叉进行控制系统的硬件和软件调试时,通常先排除系统的硬件故障,尤其是电源故障,才能安全地进行连接及综合测试。
通过在相应路况的实际操作运行,可直观地发现,相比于一般的智能驾驶客车,基于NI myRIO控制器的智能驾驶客车具有速度快、精准度高、稳定性强等优点,但也存在一些小问题,即在路况水量超过400 mm高度时,行驶会受到一定的影响,相应的运行效率不是很高。因此,在设计过程中要明确各元器件的工作条件,考虑到电机稳定性,可采用成本相对较低,稳定性高的精进电机,通过在LabVIEW程序框图上的设计,适当地对编码器的数值进行整定,可有效地解决此类问题。
5.2 系统软件调试
软件部分的设计对于整个系统来说至关重要,通常针对不同的数据运用不同的软件进行仿真测试。
在软件数据采集的过程中,曾尝试过使用多种软件来对标志位、堆栈溢出、计算数据、工作寄存器等多种数据进行采集[11],最终选择MATLAB软件,主要是因为MATLAB软件可以对智能驾驶客车运行数据进行仿真分析。辅助控制器STM32F407程序应用Keil uVision5软件的编写制作,由LabVIEW软件进行最后的程序构造,传输到NI myRIO控制器[12],来对主要功能的搭建进行处理并集合。但制作过程中有时会遇到中断响应不及时或中断响应错误的情况。通过对中断控制寄存器初值的调试,进行了多种数据的测试和整定,最终得到了较好的解决办法。
本文使用了NI myRIO控制器与STM32F407单片机对整车控制器的动力性和经济性的策略进行优化,同时对智能驾驶客车路况显示进行了研究与开发;本系统对今后行业的发展,成本的降低,加快生产线的流动起着至关重要的作用,为人机交互工作未来的发展提供了参考。
猜你喜欢路况客车界面高速公路路况信息系统中国交通信息化(2023年1期)2023-03-18国企党委前置研究的“四个界面”当代陕西(2020年13期)2020-08-24客车难改下滑颓势汽车观察(2019年2期)2019-03-15金龙客车的不凡履历汽车观察(2018年12期)2018-12-26客车市场进入寒冬?汽车观察(2018年10期)2018-11-06从路况报道看广播“类型化”新闻的要素构成传媒评论(2018年11期)2018-02-16基于FANUC PICTURE的虚拟轴坐标显示界面开发方法研究制造技术与机床(2017年5期)2018-01-19基于Cruise的纯电动客车动力系统匹配北京汽车(2017年3期)2017-10-14人机交互界面发展趋势研究潍坊学院学报(2016年2期)2016-12-01手机界面中图形符号的发展趋向新闻传播(2015年11期)2015-07-18






